Mapping and Navigation for a Robot Waiter
This project implements mapping and navigation algorithms for a simulated robot waiter in a coffee shop environment. Here, Probabilistic Roadmap (PRM) and Adaptive Monte Carlo …

Hi I am Filippo! Robotics Engineer at COBOD International.
I enjoy making things. Here are a selection of projects that I have worked on over the years.
This project implements mapping and navigation algorithms for a simulated robot waiter in a coffee shop environment. Here, Probabilistic Roadmap (PRM) and Adaptive Monte Carlo …
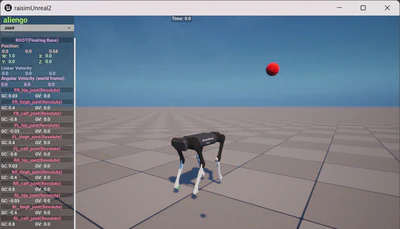
Using the Aliengo quadruped robot model, the goal was to compute different robot parameters with increasing difficulty.
This was the main project of the course Robot Task and Motion Planning at KAIST. This project was intended to make the students truly understand and appreciate why sampling-based …
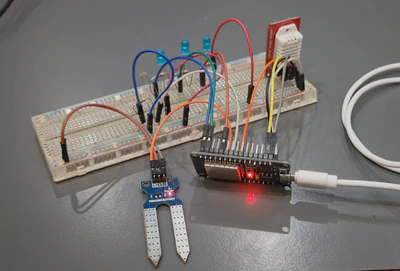
BonsAI is an intelligent and innovative system aimed at taking care of plants and tracking their health status. One of its key features is indoor/outdoor recognition and the …